
Collection: Arduino Robot Arms
Overview
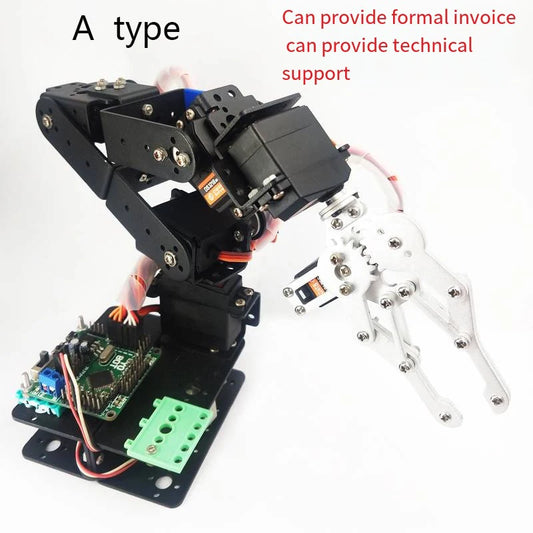
Every Arduino robot arm in our catalog is designed for direct control from an Arduino Uno, Mega, or Nano — no external motor driver required for servo-based kits. Plug servo signal wires into PWM pins, upload the included sketch, and the arm moves on first power-up. Seven of our ten active kits explicitly support Arduino as their primary control platform.
Programming an Arduino Robot Arm
Servo control from Arduino uses the built-in Servo.h library. Each servo occupies one PWM-capable digital pin and is controlled with a single servo.write(angle) command where angle is 0–180. For a 6-DOF arm with 6 servos, you need 6 PWM pins — the Arduino Mega or a PCA9685 I2C servo driver board is recommended for arms with 5 or more joints. All kits include sample Arduino sketches covering basic joint sweep, sequential position sequences, and (for applicable variants) PS2 wireless controller parsing.
| Compatible Boards | Arduino Uno, Mega, Nano; ESP32; Raspberry Pi |
|---|---|
| Library | Servo.h (servo kits), AccelStepper (stepper kits) |
| PWM Pins Required | 1 per DOF (3–7 pins) |
| Code Included | Yes — Arduino .ino sketches with all kits |
| IDE | Arduino IDE 2.x compatible |
| DOF Range | 1 – 7 DOF |
Quick Start: 6-DOF Arm Code Pattern
Related Collections
Also explore: 6 DOF Robot Arms, STEM Kits, and Servo Motor Arms.
Shipping & Returns
Free US shipping on orders over $49. Ships 1–3 business days. 30-day guarantee.

-
6 DOF Robot Arm Kit - Educational Manipulator for Arduino
Regular price From $69.95Regular price From $69.95 Sale priceUnit price per$69.95

Blog posts
View all-

Best STEM Robot Kits in 2026 for Students Who W...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...
Best STEM Robot Kits in 2026 for Students Who W...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...
-

4 DOF vs 6 DOF Robot Arm Kits: Which Build Make...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...
4 DOF vs 6 DOF Robot Arm Kits: Which Build Make...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...
-

How to Choose a DIY Robot Arm Kit in 2026: A Pr...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...
How to Choose a DIY Robot Arm Kit in 2026: A Pr...
We reviewed the buildable robot arm kits for makers, classrooms, and engineering learners angle behind DIY Robotic Arm and mapped it to hands-on STEM learning and build-to-learn projects with real...


